联系电话:17795608720
固定电话:029-81124223


目前,国家大力提倡生态文明建设,特别强调加大耕地保护力度,恢复矿山占用和被破坏的耕地面积迫在眉睫,我国在这方面也做了大量的工作,然而根据《2012年中国国土资源统计年鉴》统计,我国尚有80%左右的矿业废弃地尚未修复,国内矿区生态修复工作任重道远。
由于矿区分布零散,面积相对较小,采用传统方法获取矿区不同时相的影像资料,需要定期利用航空或航天手段,成本高昂,分辨率低。无论从经济、效率还是质量方面均已不适宜现阶段研究。随着无人机遥感技术的兴起,易科泰紧跟前沿科技步伐,自主设计研发了EcoDrone无人机多光谱遥感系统,搭配专业地面光谱测量系统,以其优异的性能、高效的作业及低廉的成本在矿区生态修复研究中倍受亲睐。
本次研究区为河北境内某铁矿矿区,总面积约5Km²。当地为暖温带半湿润季风气候,夏季降雨量充沛。研究区内由于生态恢复良好,植被较为茂密;由于前期采矿,导致地形高差较大,有大面积水域;铁矿导致研究区地磁环境复杂。上述环境对航摄时间选择、无人机性能、飞控人员操控、以及数据后处理均有很大考验。

图1 研究区照片
2017年8月11至13日,易科泰无人机遥感事业部运用自主研发设计的UAS-4四旋翼无人机遥感平台搭载RedEdge5通道多光谱相机对河北某矿区进行无人机多光谱遥感数据获取。本研究课题从技术设计、航摄实施到数据处理检查全过程严格按照《数字航空摄影规范 第1部分:框幅式数字航空摄影》(GB/T 27920.1-2011)、《无人机航摄系统技术要求》(CH/Z 3002-2010)、《数字测绘成果质量检查与验收》(GB/T 18316-2008)等相关规范要求,圆满完成预定区域数据采集工作。

图2 无人机现场作业

图3 Spectrosense手持式光谱测量系统实地测量NDVI
表1 技术参数及数据信息
|
相机 |
数据 |
|||||||
|
波段数 |
分辨率 |
焦距 |
像元大小 |
像幅 |
面积 |
相对航高 |
实际分辨率 |
影像数量 |
|
5 |
8cm/120m |
5.5mm |
3.75μm |
1280×960 |
5km2 |
130m |
8.6cm |
6240*5 |
(1)色彩融合
本次作业过程中由于受雨天、云影以及强地磁环境影响,软件全自动处理后存在小部分色差、拼接漏洞问题,需要经过人工编辑处理消除。

图4 RGB影像(部分)人工处理前后对比
(2)DEM内插
由于水体匹配漏洞、地形起伏引起的投影差存在,自动生成的DEM需要经过平滑内插消除高程误差,才能用于后期专业分析。
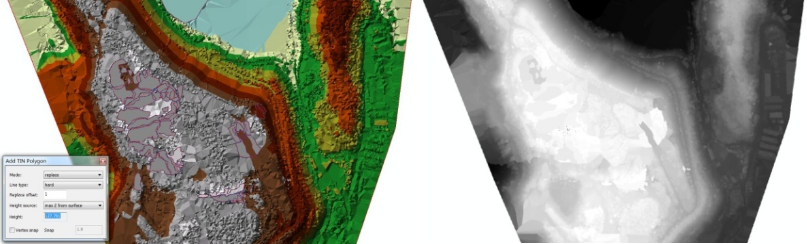
图5 DEM构TIN内插
(3)NDVI对比校准
由于影像存在投影差导致地物有变形,因此通过光谱波段提取的NDVI值在影像变形大的区域存在较大误差。我们可通过Spectrosense地面光谱测量系统实地测得精确NDVI值对其进行精度检验和校准,从而可获得高精度的NDVI值。
表2 NDVI实测检验对比
|
检查点号 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
直接测定 |
-0.11 |
0.78 |
0.84 |
0.84 |
0.42 |
0.79 |
0.82 |
0.73 |
-0.11 |
|
影像提取 |
-0.011 |
0.614 |
0.701 |
0.625 |
0.427 |
0.704 |
0.688 |
0.657 |
0.062 |
|
较差 |
-0.099 |
0.166 |
0.139 |
0.215 |
-0.007 |
0.086 |
0.132 |
0.073 |
-0.172 |
|
中误差 |
0.134 |
||||||||
注:高精度检验中误差计算公式:
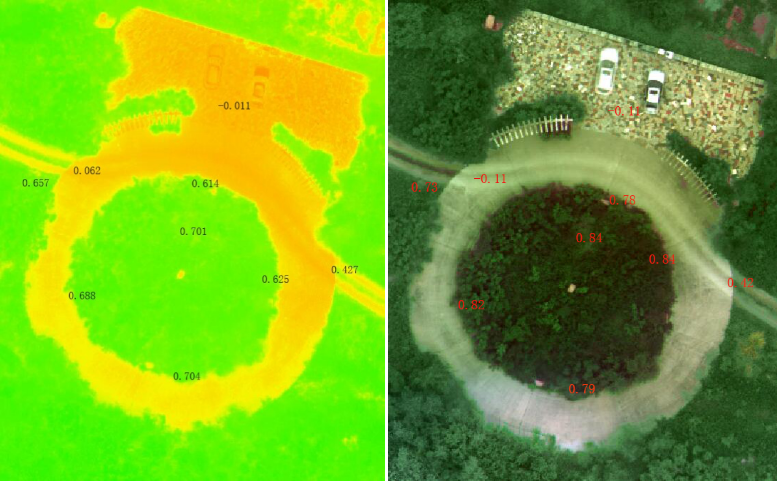
图6 左图为影像提取NDVI值 右图为Spectrosense直接测定NDVI值
由中误差看出,影像提取的NDVI和Spectrosense直接测得NDVI存在较大误差,引起原因主要是Spectrosesnse传感器经余弦校准测得方圆0.6m²的均值,而本次影像获取由于雨后植被叶面未干,且相机没有进行精确反射校准而存在杂波和畸变,提取NDVI会存在误差。因此,红外摄影必须避开雨后初晴或露水较大时段。
小结
EcoDrone无人机多光谱遥感系统从技术路线设计、实际作业执行、飞行保障到数据后处理整个技术体系合理高效,完全满足科学研究对于数据质量、现势性、数据完整性以及精度的严格要求。其高效便捷的作业流程在本次矿区数据获取处理任务中,得到了客户的高度认可。依靠易科泰生态技术有限公司在生态领域积累的丰富技术及经验,EcoDrone无人机遥感系统在矿区生态修复研究领域必将展现广阔的发展前景。

全部评论